LaneKerb Detection
LaneKerb detection package is a real-time road feature detection method which includes the lane and kerb detection under various road scenarios and diverse weather conditions. It can provide road boundary information and lane-level information for autonomous vehicle navigation.
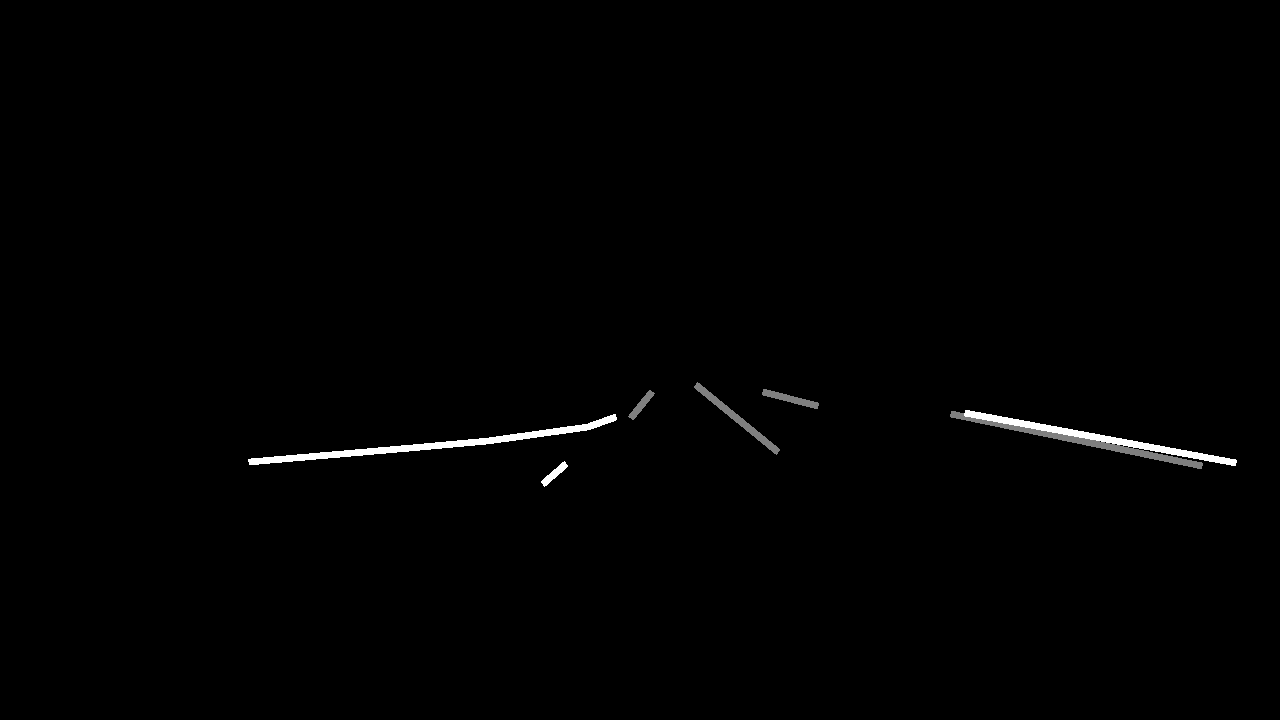
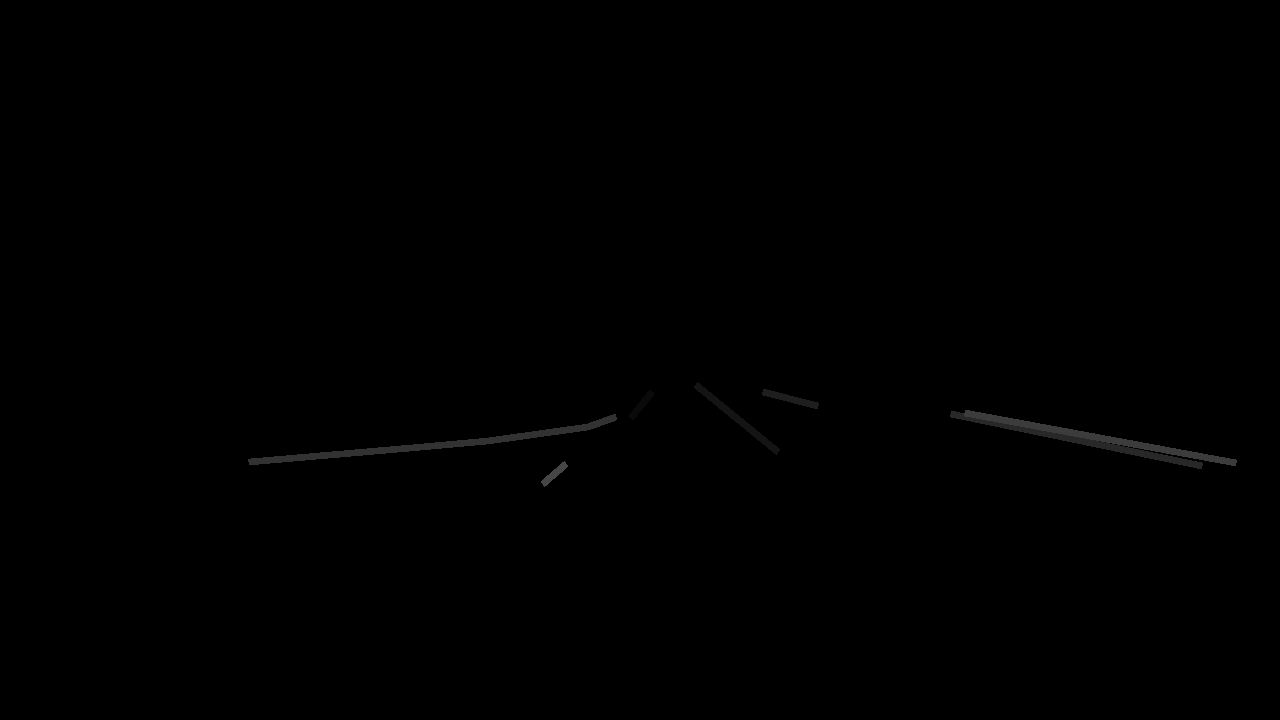
Fig. 3 Demo on NTU campus
Features
Lable your data with Scalabel annotation tool.
Data format conversion bdd-data needed for training LaneKerbNet deep neural network using your data labeled by Scalabel.
A ROS node LaneKerbNetRos for lane and kerb detection using instance segmentation deep neural network.
Able to handle multiple lanes and multiple kerbs on straight and curvy roads, at roundabout as well as on slope.
Able to handle lane and kerb detection on rainy days.

Fig. 4 Scalabel lane and kerb lable

Lane and kerb groundtruth, class and instance visualization.